

Inertial measurment units test robot

Forschungsprojekt TheraTex, DXM–kunsthochschule weißensee berlin, 2020
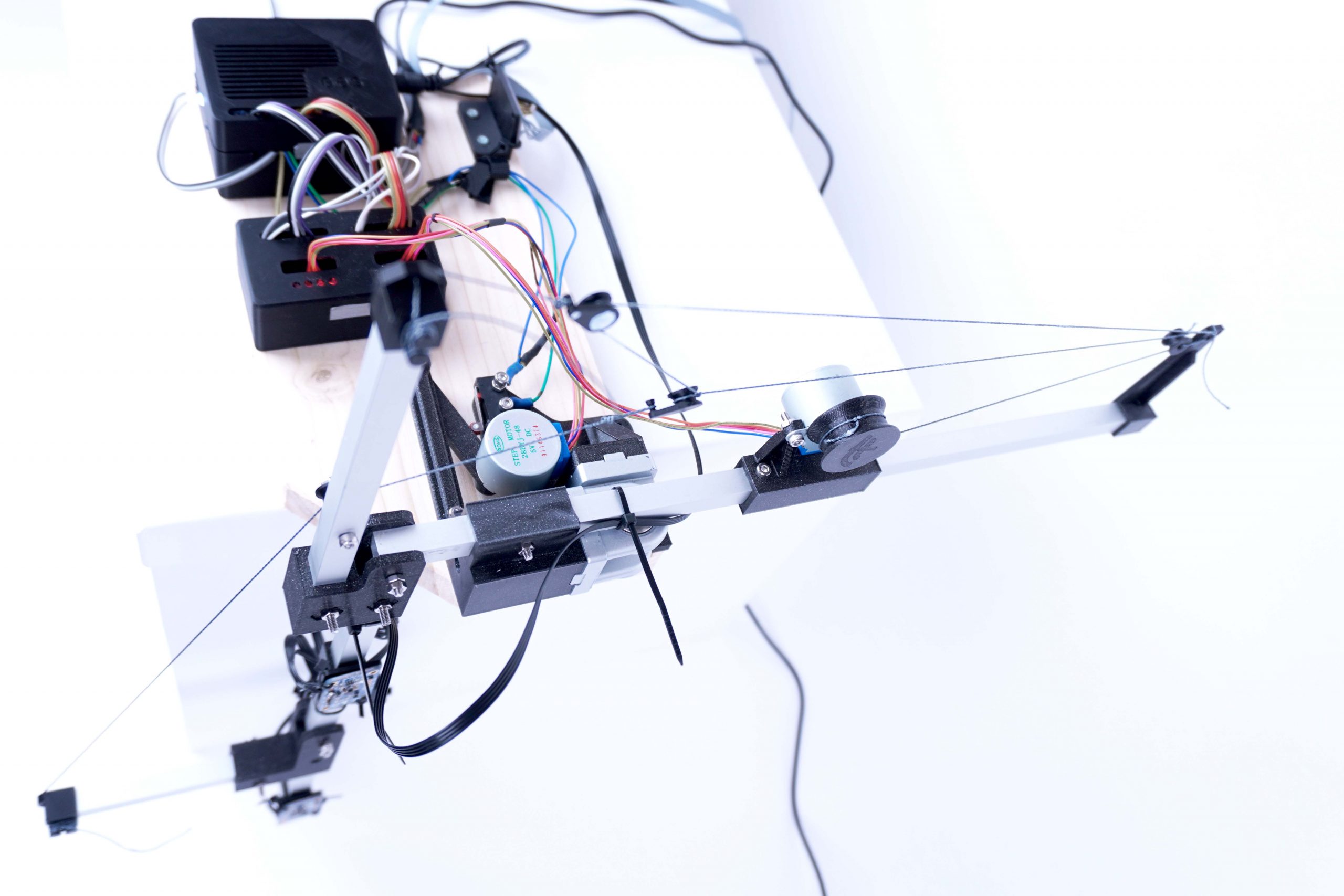
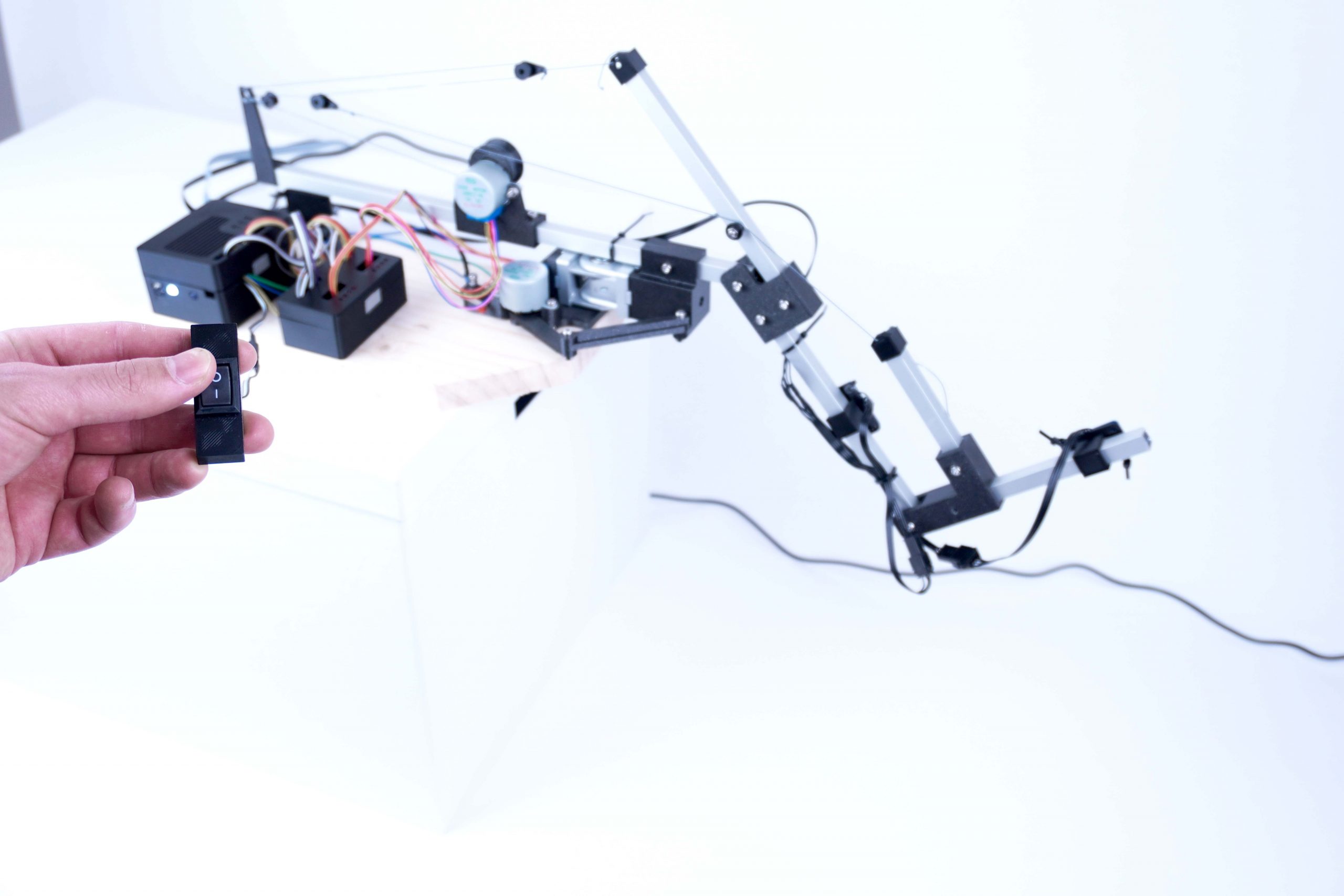
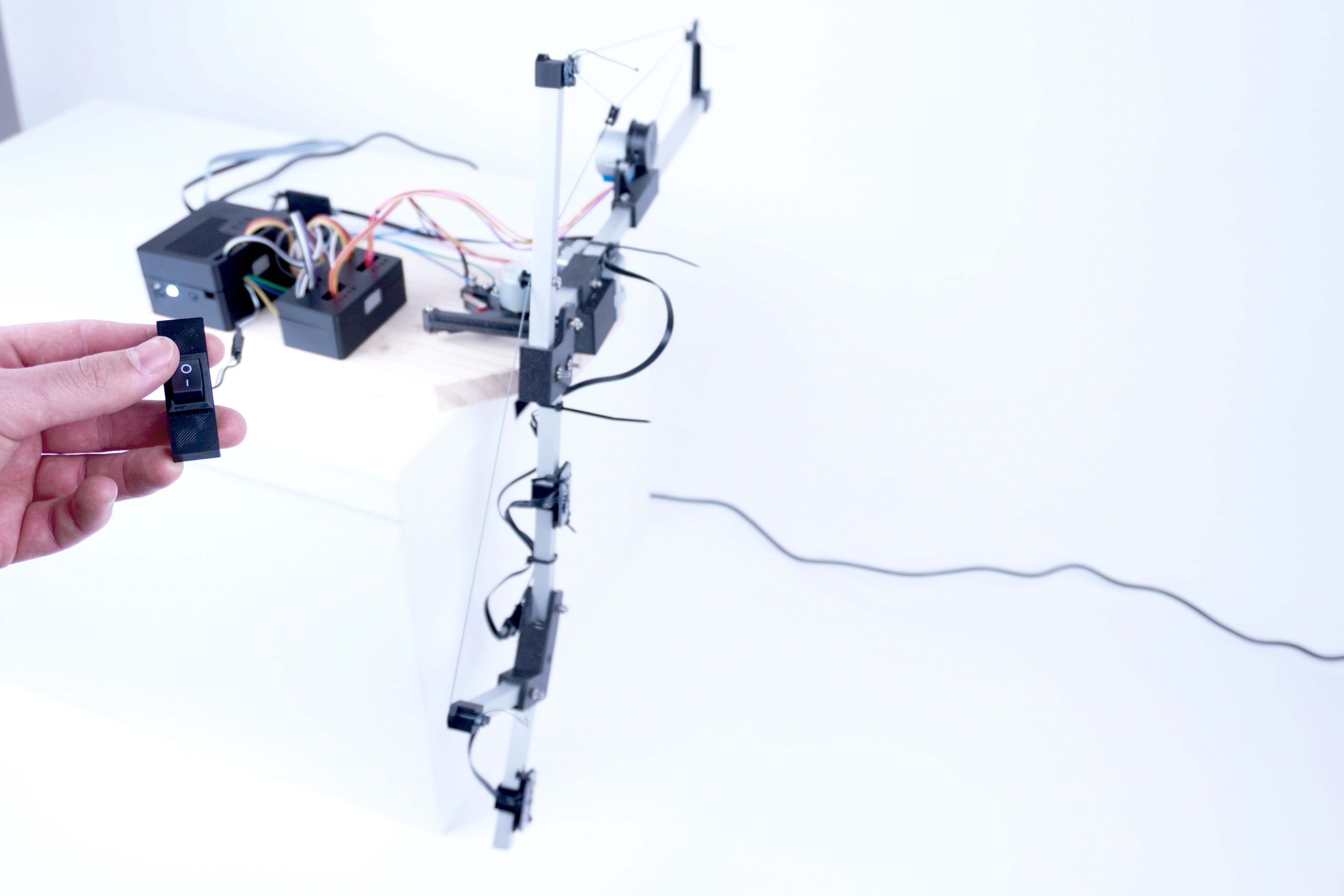
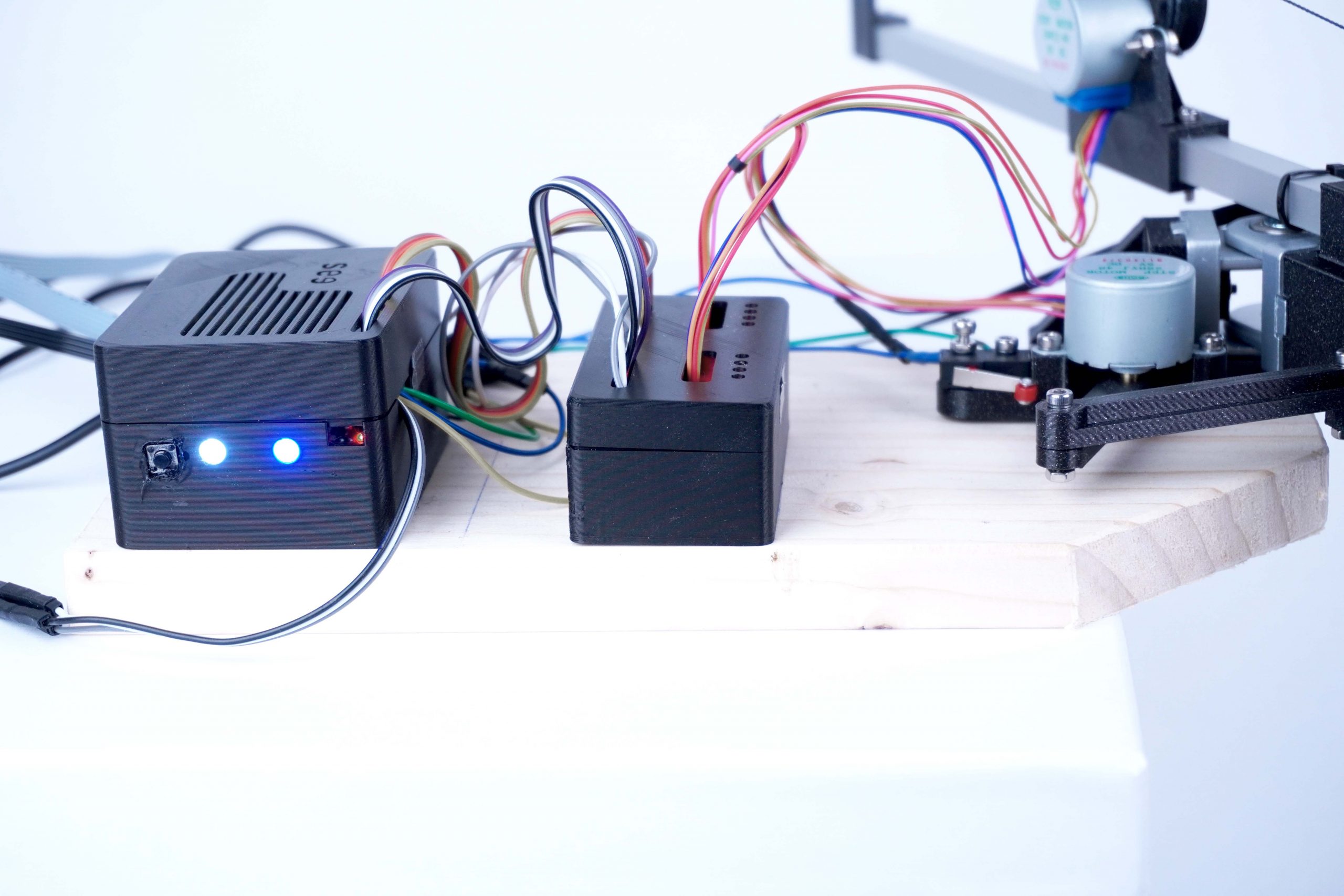
This robot was designed with a focus on rapid manufacturability. In order to test the developed code for motion detection using inertial measurement units, the software developers on the project required a spatially and temporally precisely repeatable motion with dimensions resembling those of a human arm. The robot performed a repeatable motion involving flexion of the elbow joint coupled with simultaneous rotation of the shoulder joint. The rapid assembly using aluminum profiles, 3D-printed components, and stepper motors enabled timely correction of errors in the code and identifying the root causes of issues like sensor data drift.